การเดินอากาศ (Navigation)
พิกัดบนโลก การเอียงของแกนโลก การแปลงทิศจาก True ไป Compass การแก้มุมปัดลม และโจทย์คำนวณกฎ 1 in 60 กับการหา QDM
เว็บไซต์นี้จัดทำเพื่อการศึกษาและการเตรียมสอบเบื้องต้น ผู้เรียนควรตรวจสอบกับเอกสารทางการของหน่วยงานกำกับดูแลและครูการบินก่อนนำไปใช้จริง เนื้อหาอ้างอิงมาตรฐาน EASA เป็นหลัก ตัวเลขและกฎบางข้ออาจต่างจากหลักสูตรของสำนักงานการบินพลเรือนไทย (CAAT)
เว็บไซต์นี้เป็นโครงการอิสระเพื่อการศึกษา ไม่ได้สังกัด ไม่ได้รับการรับรอง และไม่มีส่วนเกี่ยวข้องกับ EASA, ICAO, CAAT หรือหน่วยงานกำกับดูแลใด ๆ ข้อสอบเป็นเนื้อหาที่เรียบเรียงขึ้นเอง หรือนำมาจากแหล่งทางการที่เผยแพร่สู่สาธารณะ/เปิดให้ใช้ได้อย่างเสรี (เช่น FAA ซึ่งเป็นสาธารณสมบัติ และคลังข้อสอบ PSTAR ของ Transport Canada) โดยมีการระบุที่มาในแต่ละข้อ ทั้งนี้ไม่ใช่ข้อสอบจริงที่ใช้สอบของ EASA หรือ CAAT
ก่อนยุค GPS นักบินหาทางด้วยแผนที่ นาฬิกา และเข็มทิศเท่านั้น ศิลปะของการเดินอากาศ (navigation) คือการเปลี่ยนลม เวลา และทิศทาง ให้กลายเป็นเส้นทางที่พาคุณไปถึงจุดหมายได้พอดี
7.1 โลก พิกัด และฤดูกาล
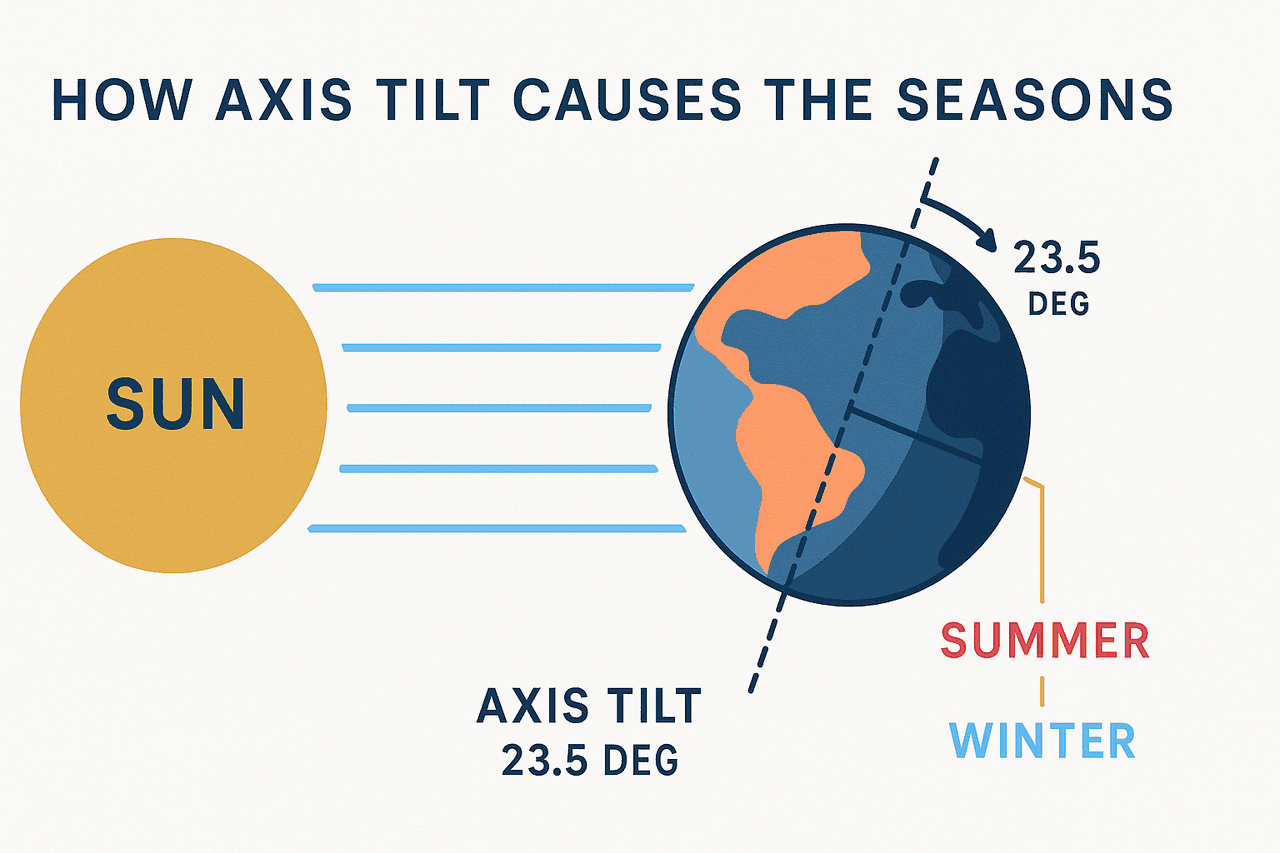
ตำแหน่งบนโลกระบุด้วย ละติจูดและลองจิจูด ส่วนการที่แกนโลกเอียงทำมุม 23.5 องศา คือต้นเหตุของฤดูกาล รวมถึงปรากฏการณ์ครีษมายันและเหมายัน (solstice) กับวิษุวัต (equinox)
7.2 ลมกับการแก้มุมปัดลม (Drift)
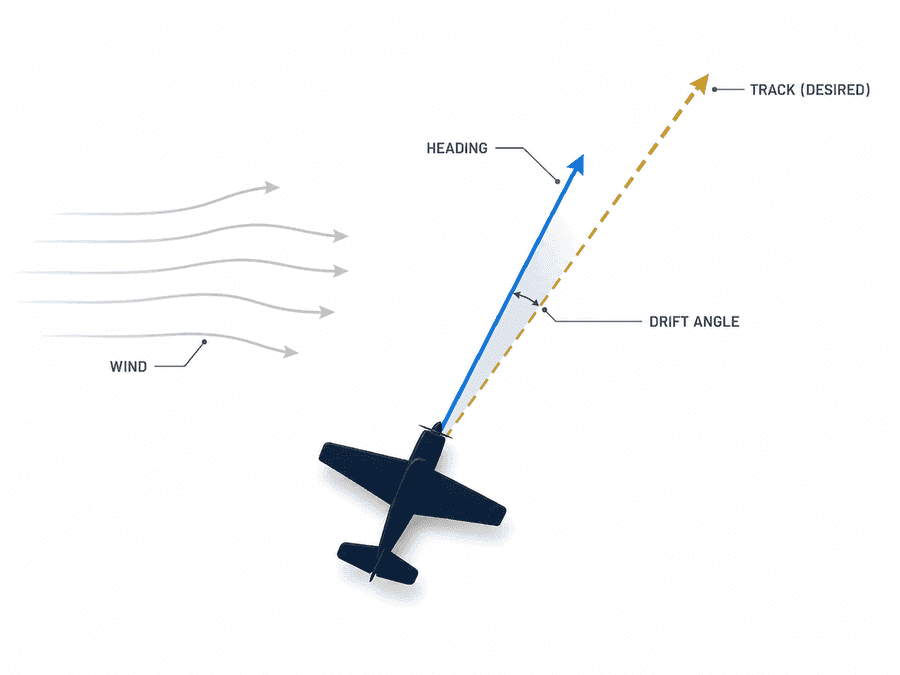
ลม (wind) ทำให้ ทิศที่จมูกชี้ (heading) แตกต่างจาก เส้นทางจริงเหนือพื้น (track) มุมที่ต่างกันเรียกว่า มุมปัดลม (drift) ซึ่งนักบินต้องชดเชยเพื่อให้ไปถึงจุดหมายได้ตรง
7.3 โจทย์คำนวณที่ออกสอบบ่อย
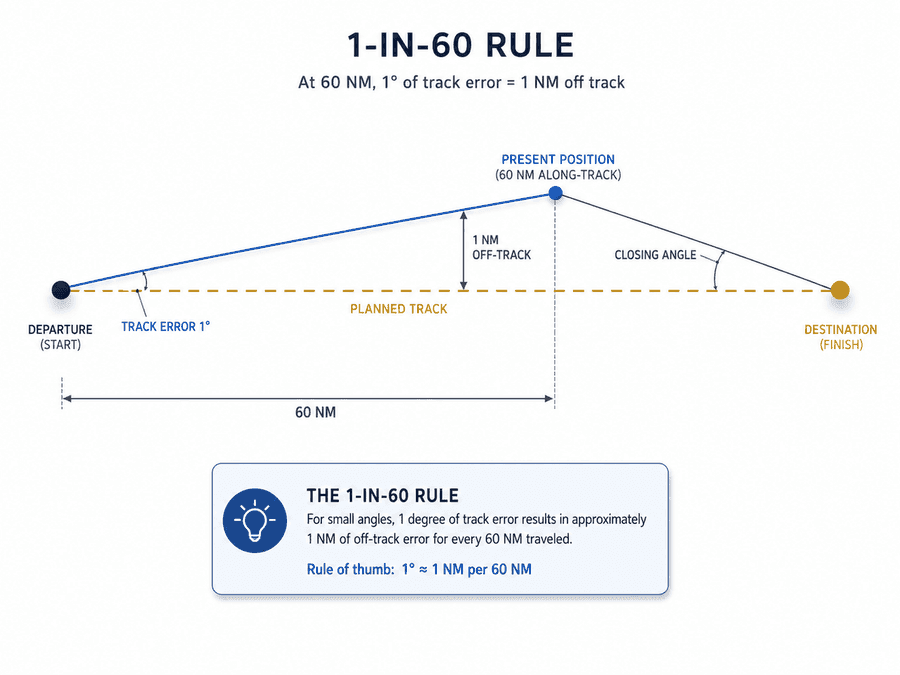
กฎ 1 in 60
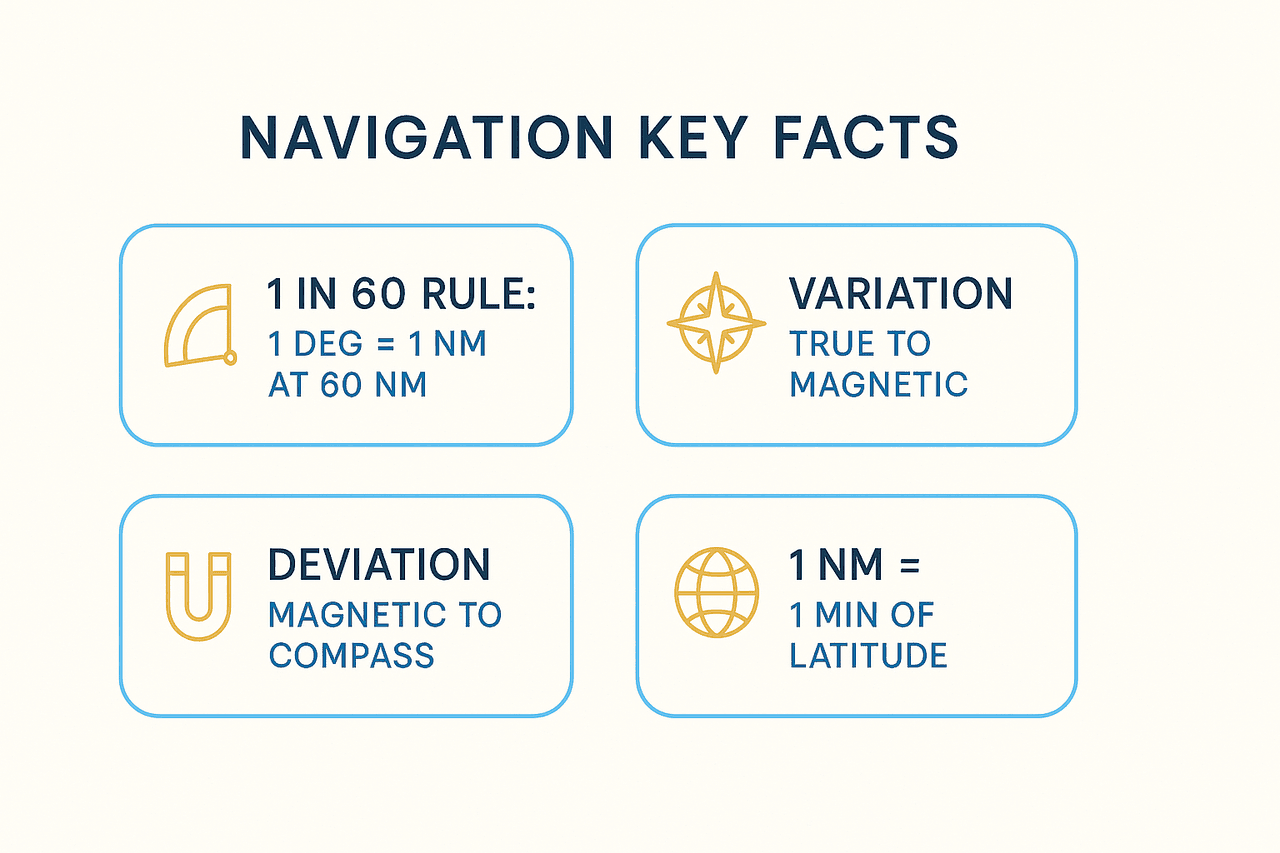
หลักคือ ทุก ๆ หนึ่งองศาที่ออกนอกเส้นทาง จะเบนออกประมาณหนึ่งไมล์ทะเลเมื่อบินไปได้ 60 ไมล์ทะเล
- Track Error = (ระยะที่ออกนอกทาง ÷ ระยะที่บินมาแล้ว) × 60
- Closing Angle = (ระยะที่ออกนอกทาง ÷ ระยะที่เหลือ) × 60
- มุมที่ต้องแก้ = Track Error + Closing Angle
การหา QDM จากเข็มเบริงสัมพัทธ์
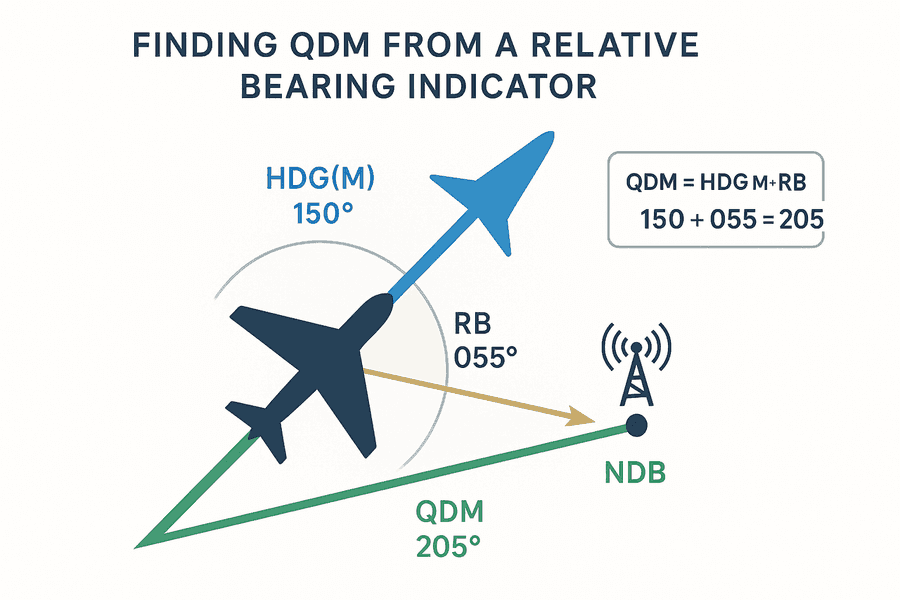
เข็มเบริงสัมพัทธ์ (RBI) แสดงทิศของสถานี NDB เทียบกับหัวเครื่อง สูตรง่าย ๆ คือ QDM = ทิศหัวเครื่องแม่เหล็ก (HDG M) + ค่าเบริงสัมพัทธ์ (RB)
Rhumb Line กับ Great Circle
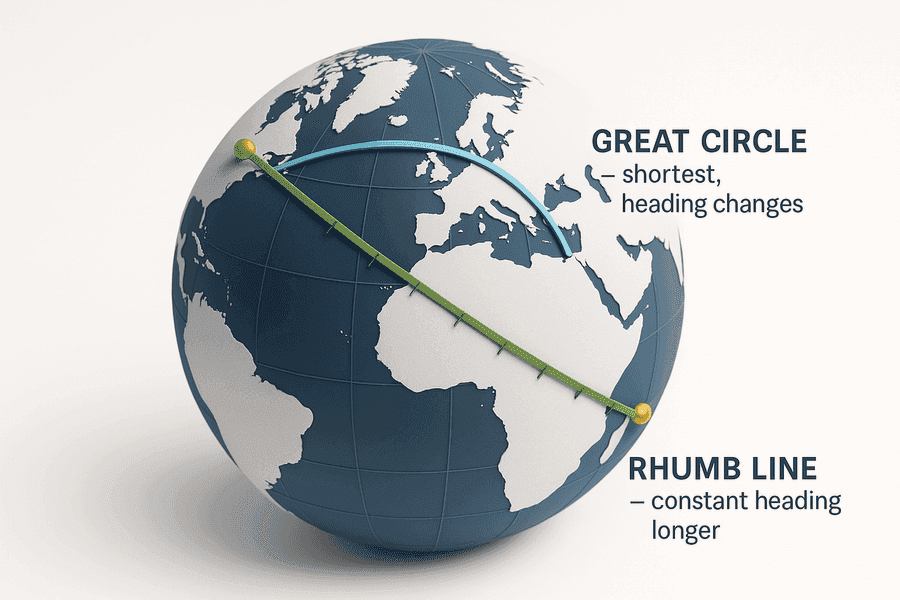
ในการบินระยะไกล เราต้องเลือกระหว่างเส้นทางสองประเภท Great Circle คือเส้นทางสั้นที่สุดบนพื้นโลก — เหมือนขึงเชือกตึงบนลูกโลก — แต่มีข้อเสียคือ heading [bearing] เปลี่ยนตลอดเวลา เพราะ great circle ตัด meridian แต่ละเส้นในมุมที่ต่างกัน Rhumb Line หรือ Loxodrome คือเส้นที่ตัด meridian ทุกเส้นในมุมคงที่ ทำให้บินได้ด้วย heading เดียวตลอดเที่ยวบิน แต่จะยาวกว่า great circle เสมอ ยกเว้นเมื่อบินตาม Equator [เส้นศูนย์สูตร] หรือตาม meridian พอดี ซึ่งสองกรณีนี้ rhumb line และ great circle ทับกันพอดี
---
Convergency และ Conversion Angle
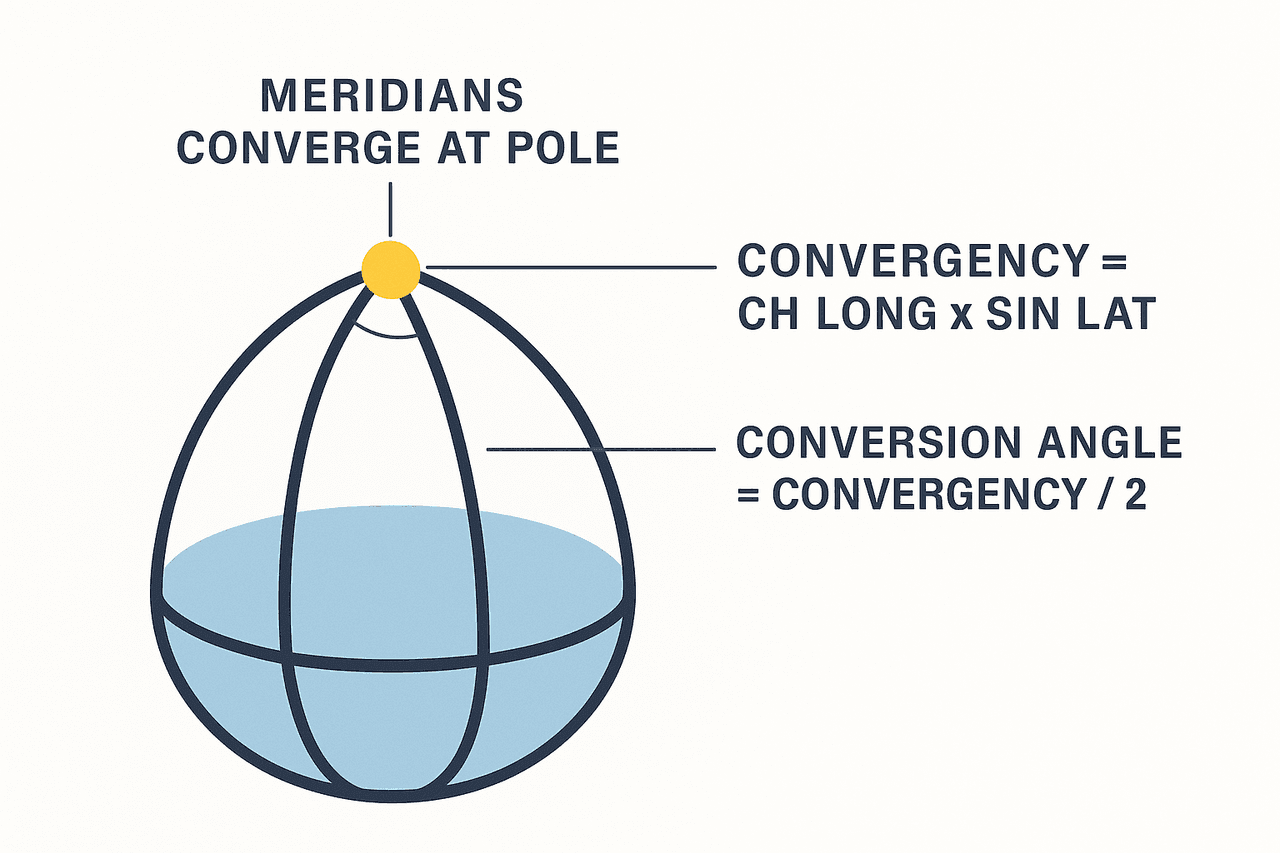
เพราะ meridian ทุกเส้นบรรจบกันที่ขั้วโลก มุมระหว่าง meridian สองเส้นจึงแคบลงเมื่อเข้าใกล้ขั้ว ค่านี้เรียกว่า Convergency [ความเบี่ยงเบนของ meridian] คำนวณได้จาก:
Convergency = d.long × sin(mid-latitude)
โดยที่ d.long คือผลต่างของ longitude สองจุด และ mid-latitude คือ latitude กึ่งกลางระหว่างสองจุดนั้น Conversion Angle คือครึ่งหนึ่งของ Convergency และใช้แปลง great circle bearing เป็น rhumb line bearing (หรือกลับกัน)
Conversion Angle = Convergency ÷ 2
---
Lambert Conformal Conic และ Mercator Charts
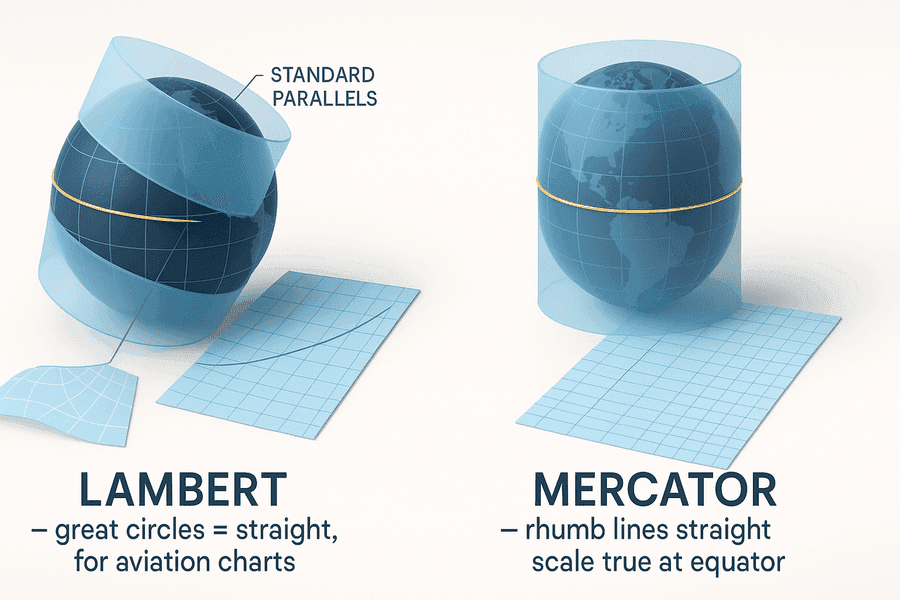
แผนที่สองประเภทที่ใช้มากใน aviation มีคุณสมบัติต่างกันชัดเจน Lambert Conformal Conic ฉายแผนที่โดยใช้กรวยตัดพื้นโลกที่ standard parallels สองเส้น — great circles จะดูเกือบเป็นเส้นตรงบนแผนที่นี้ และ scale แม่นยำที่ standard parallels ทำให้เหมาะสำหรับ navigation charts [แผนที่นำทาง] เช่น ICAO 1:500,000 และ 1:250,000 Mercator ฉายแผนที่โดยใช้กระบอกสัมผัสเส้นศูนย์สูตร — rhumb lines เป็นเส้นตรงทุกเส้น แต่ scale แม่นยำเฉพาะที่เส้นศูนย์สูตร และ scale ขยายใหญ่มากที่ latitude สูง ทำให้ Mercator เหมาะกับการเดินเรือและแผนที่ weather มากกว่า aviation navigation
---
UTC และเวลาท้องถิ่น
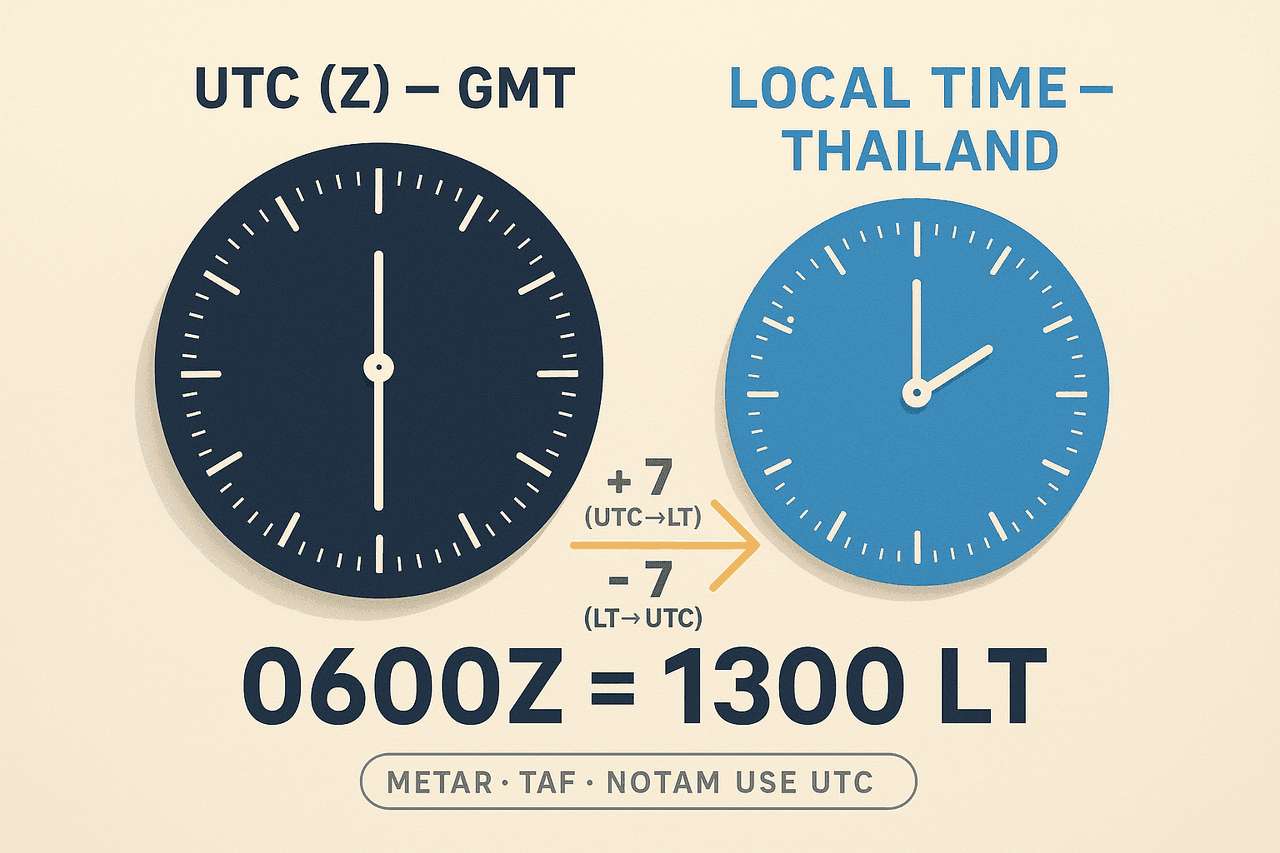
UTC (Coordinated Universal Time) หรือที่เรียกกันว่า GMT (Greenwich Mean Time) คือเวลามาตรฐานสากลที่ใช้ใน aviation ทั่วโลก ประเทศไทยอยู่ใน timezone UTC+7 หมายความว่าเวลาท้องถิ่น (LT) เร็วกว่า UTC อยู่ 7 ชั่วโมง ดังนั้นเมื่อเราต้องการแปลง LT เป็น UTC ให้ ลบ 7 ชั่วโมง เสมอ METAR, TAF, NOTAM และเอกสาร ATC ทุกชนิดใช้ UTC โดยไม่มีข้อยกเว้น
---
DME Slant Range
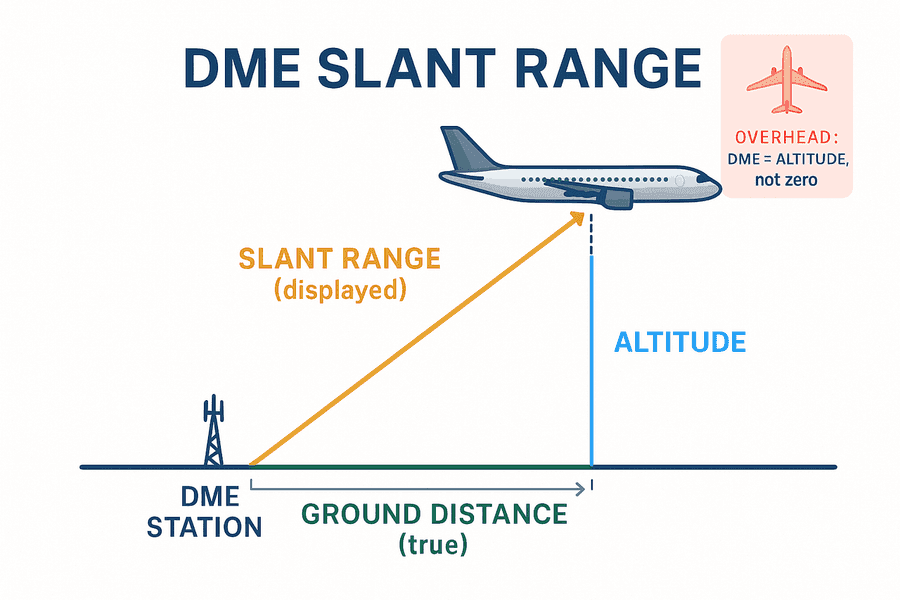
DME (Distance Measuring Equipment) วัดระยะทางโดยส่ง pulse ไปยังสถานีภาคพื้นและจับเวลาที่ได้รับ reply กลับมา ระยะทางที่แสดงใน cockpit คือ slant range [ระยะเฉียง] — ระยะทางเส้นตรงจากอากาศยานถึงสถานี ไม่ใช่ ระยะทางแนวราบบนพื้นโลก ข้อผิดพลาดนี้มีน้อยมากเมื่ออยู่ไกล แต่จะ สูงสุดเมื่ออยู่ตรงเหนือสถานี เพราะ DME จะแสดงค่าเท่ากับความสูงของอากาศยานแทนที่จะเป็นศูนย์ ที่ระยะไกล (เช่น 100 NM) ความต่างระหว่าง slant range และ ground distance น้อยมากจนไม่มีนัยสำคัญ
---
GPS/GNSS — RAIM
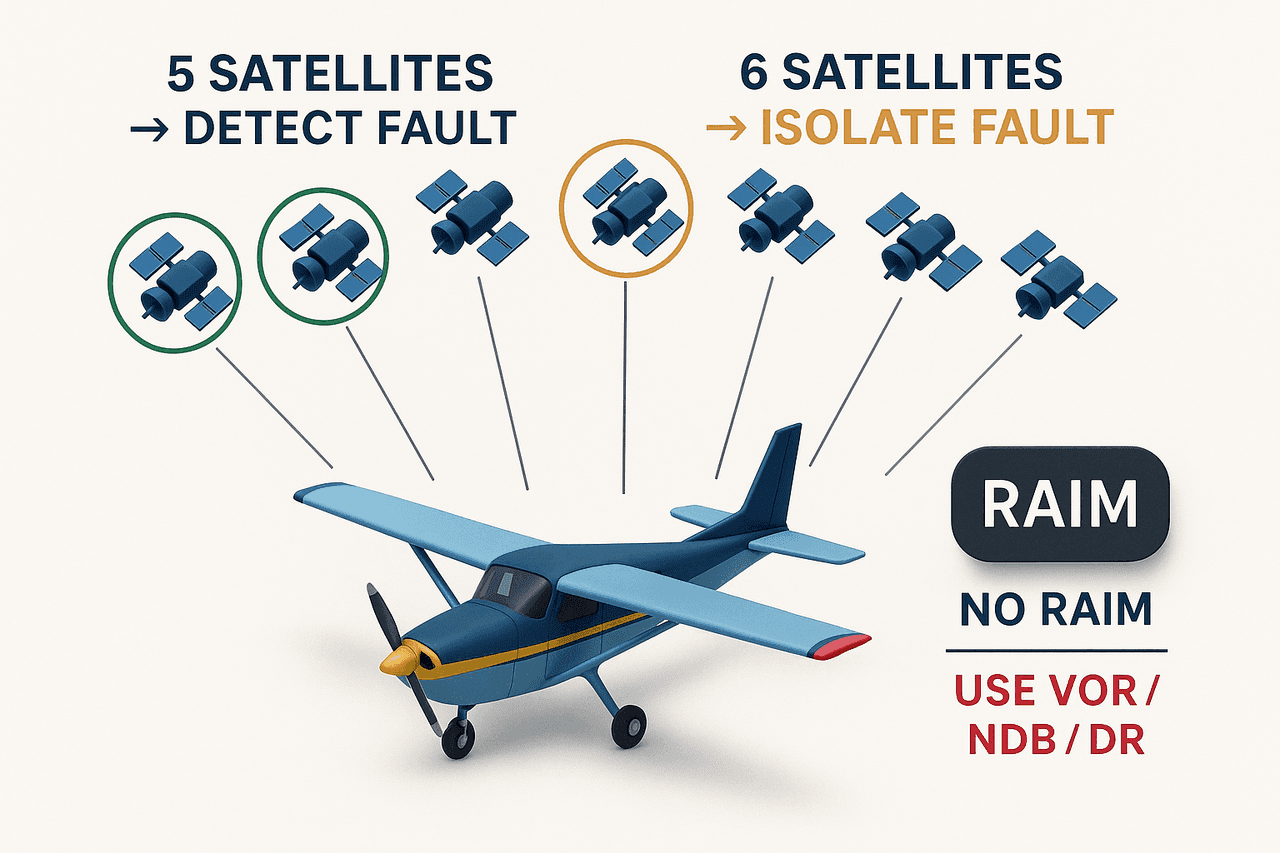
GPS เป็นส่วนหนึ่งของระบบ GNSS (Global Navigation Satellite System) ที่ใช้กันอย่างแพร่หลายใน modern aviation RAIM (Receiver Autonomous Integrity Monitoring) คือระบบที่ GPS receiver ใช้ตรวจสอบความน่าเชื่อถือและความถูกต้องของข้อมูล position ด้วยตัวเอง โดยไม่ต้องพึ่งสัญญาณภายนอก RAIM ทำงานโดยเปรียบเทียบสัญญาณจากดาวเทียมหลายดวงพร้อมกัน และต้องการ ดาวเทียมอย่างน้อย 5 ดวง จึงจะตรวจจับข้อผิดพลาดได้ (หากต้องการ isolate ดาวเทียมที่ผิดพลาดด้วย ต้องใช้ 6 ดวง) หาก RAIM ไม่พร้อมใช้งาน นักบิน ต้องใช้วิธีนำทางสำรอง เช่น VOR, NDB หรือ DR (Dead Reckoning)
เจาะหัวข้อที่ออกสอบบ่อย (อ้างอิงมาตรฐาน EASA ECQB)
การแปลงหน่วย: 1000 ฟุต ≈ 300 เมตร และ 1 NM = 1.852 กม.
ในการเดินอากาศ (navigation) ต้องจำค่าแปลงหน่วยพื้นฐานให้แม่นยำ ค่าความสูง 1000 ฟุต (feet) มีค่าประมาณ 300 เมตร (เนื่องจาก 1 ฟุต = 0.3048 เมตร ดังนั้น 1000 ฟุต = 304.8 เมตร ≈ 300 ม.) ส่วนระยะทางใช้หน่วยไมล์ทะเล (nautical mile, NM) โดย 1 NM = 1.852 กิโลเมตร = 1852 เมตร และ 1 NM ยังเท่ากับ 1 ลิปดา (minute) ของละติจูดบนพื้นโลกด้วย
มุมแก้ลม (Wind Correction Angle / Drift)
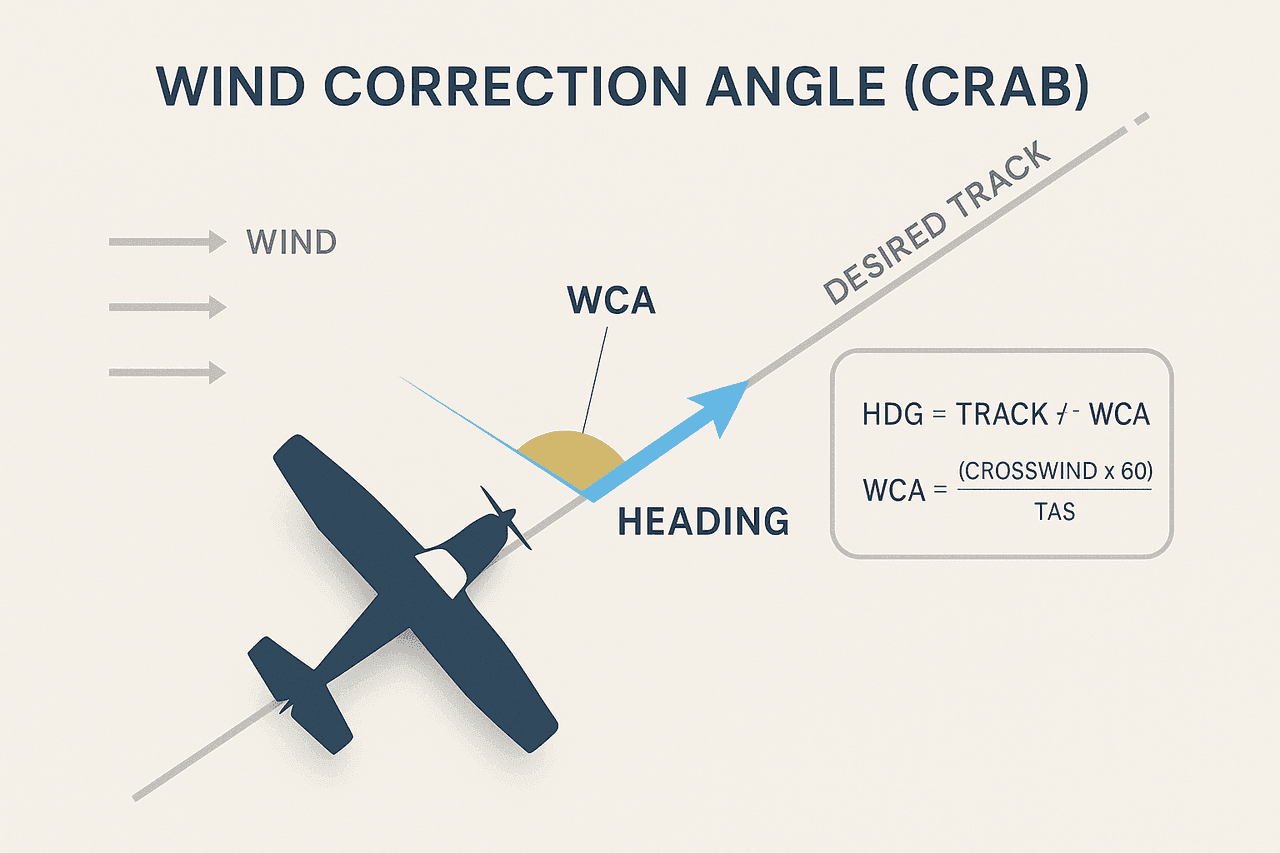
เมื่อมีลมพัดด้านข้าง ลมจะดันเครื่องบินออกจากเส้นทางที่ต้องการ (desired track) ทำให้เกิดการเลื่อนเอียง (drift) นักบินต้องหันหัวเครื่องบิน (heading) เอียงเข้าหาทิศลม (into-wind) เป็นมุมหนึ่งเพื่อชดเชย เรียกมุมนี้ว่ามุมแก้ลม (Wind Correction Angle, WCA) หรือ drift angle เพื่อให้เส้นทางจริงเหนือพื้น (track over the ground) ตรงกับที่วางแผนไว้
มาตราส่วนแผนที่ (Chart Scale เช่น 1:500000)
มาตราส่วน (scale) บอกอัตราส่วนระหว่างระยะบนแผนที่กับระยะจริงบนพื้น แผนที่การบินที่ใช้บ่อยคือ 1:500000 หมายความว่า 1 หน่วยบนแผนที่ = 500000 หน่วยจริง เช่น 1 ซม. บนแผนที่ = 500000 ซม. = 5 กม. บนพื้น อีกแบบคือ 1:250000 (ละเอียดกว่า มาตราส่วนใหญ่กว่า) ใช้แปลงระยะที่วัดได้ด้วยไม้บรรทัดให้เป็นระยะภาคพื้นจริง
เรดาร์ปฐมภูมิ (Primary Radar)
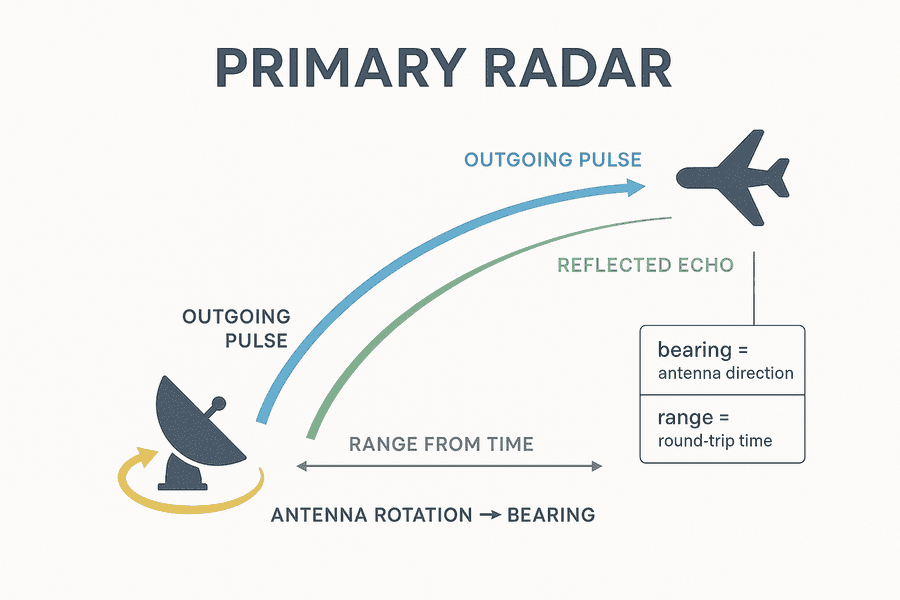
เรดาร์ปฐมภูมิ (primary radar) ทำงานโดยส่งคลื่นวิทยุ (pulse) ออกไป เมื่อคลื่นกระทบวัตถุ เช่น เครื่องบิน จะสะท้อนกลับมายังจานสายอากาศ (antenna) ระบบกำหนดทิศทาง (direction/bearing) ของเป้าหมายจากทิศที่จานสายอากาศหันไปขณะรับสัญญาณสะท้อน และกำหนดระยะ (range) จากการวัดเวลา (time) ที่คลื่นเดินทางไปและกลับ เนื่องจากคลื่นวิทยุเดินทางด้วยความเร็วคงที่ (ความเร็วแสง)
เพิ่มเติมให้ครอบคลุมการสอบ ECQB
มุมจุ่มของเข็มแม่เหล็ก (Magnetic Dip / Inclination)
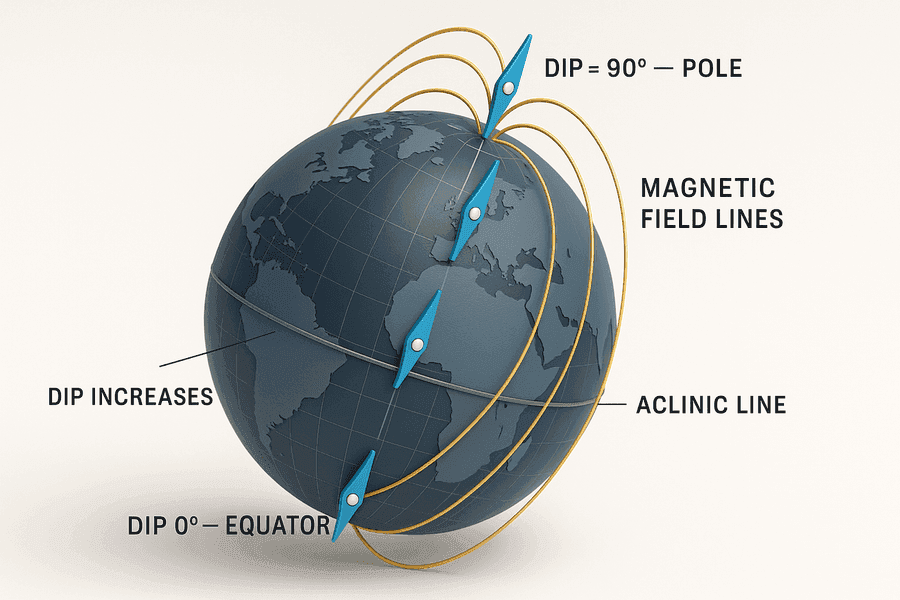
สนามแม่เหล็กโลกไม่ได้ขนานกับผิวโลก แต่จะ «จุ่ม» ลงสู่พื้น ทำให้ปลายเข็มแม่เหล็กเอียงทำมุมกับแนวระดับ เรียกว่ามุมจุ่ม (magnetic dip หรือ inclination) ที่เส้นศูนย์สูตรแม่เหล็กมุมจุ่มเป็นศูนย์ เข็มอยู่ในแนวราบ แต่ยิ่งเข้าใกล้ขั้วแม่เหล็ก (magnetic pole) มุมจุ่มยิ่งมากขึ้นจนเกือบตั้งฉาก (90 องศา) ที่ขั้ว เส้นที่ลากเชื่อมจุดที่มีมุมจุ่มเท่ากันเรียกว่า isoclinal line ส่วนเส้นที่มุมจุ่มเป็นศูนย์เรียกว่า aclinic line หรือเส้นศูนย์สูตรแม่เหล็ก
หลักการทำงานของ VOR (VHF Omnidirectional Range)
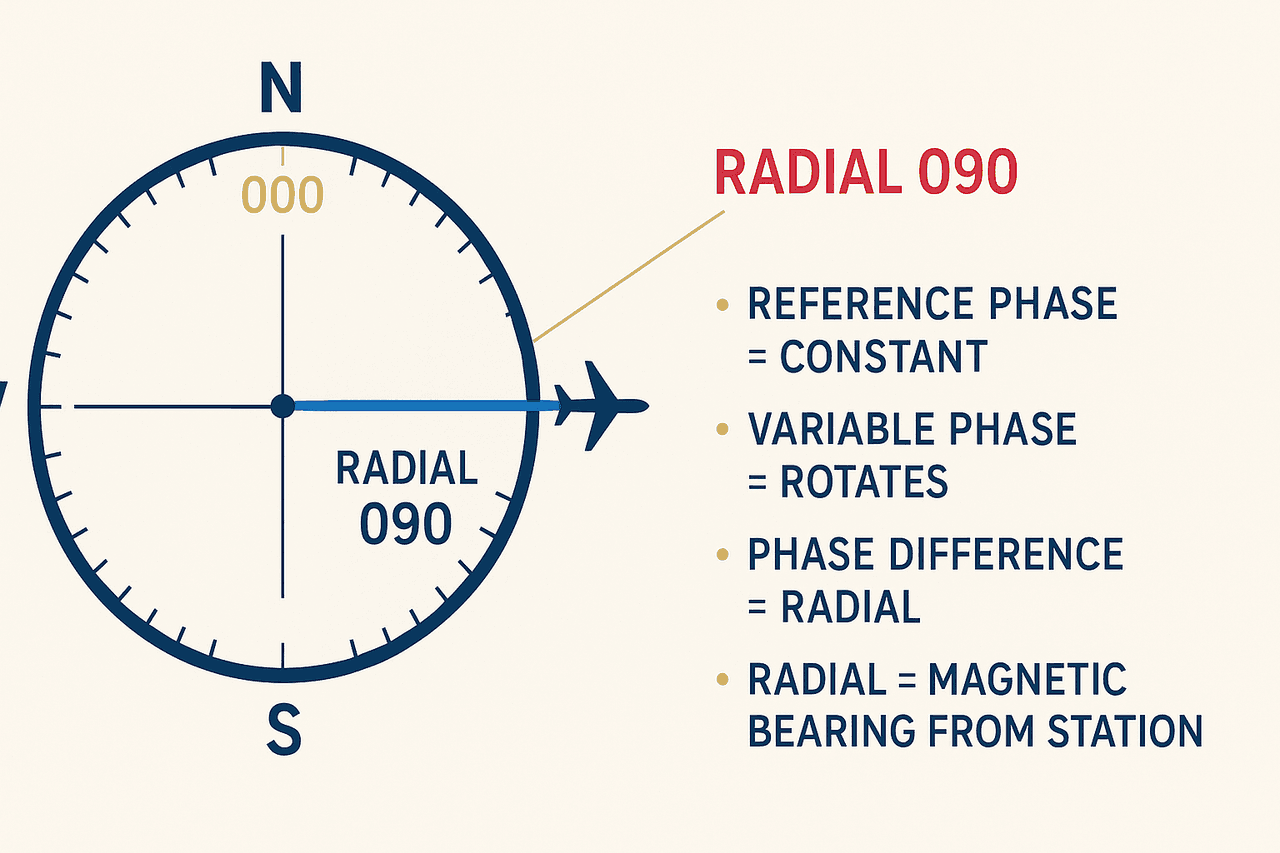
VOR เป็นเครื่องช่วยเดินอากาศย่าน VHF ที่ส่งสัญญาณสองชุดออกมา ชุดแรกคือ reference phase ที่กระจายรอบทิศเท่ากันทุกองศา ชุดที่สองคือ variable phase ที่หมุนกวาดรอบทิศ เครื่องรับวัดความต่างเฟส (phase difference) ของสองสัญญาณนี้เพื่อบอกว่าเครื่องบินอยู่บนแนวเส้นใดจากสถานี แนวนี้เรียกว่า radial ซึ่งวัดเป็นทิศแม่เหล็ก «ออกจาก» สถานี เข็ม CDI จะเบนซ้ายหรือขวาเพื่อบอกว่าต้องเลี้ยวไปทางใดจึงจะกลับเข้าแนวที่ตั้งไว้ พร้อมตัวบ่งชี้ TO/FROM ว่ากำลังบินเข้าหาหรือออกจากสถานี
การแพร่กระจายคลื่นวิทยุและ Coastal/Night Effect
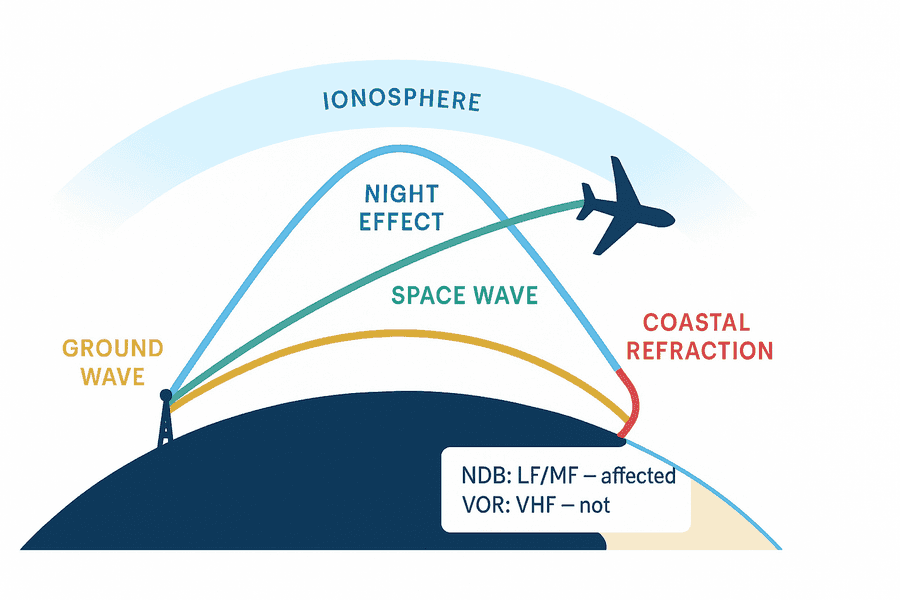
คลื่นวิทยุเดินทางได้สามแบบหลัก ได้แก่ ground wave ที่เลาะไปตามผิวโลกได้ดีในย่านความถี่ต่ำ (LF/MF), sky wave ที่สะท้อนกับชั้น ionosphere ทำให้ไปได้ไกลโดยเฉพาะกลางคืน และ space wave ที่เป็นแนวสายตา (line of sight) ในย่าน VHF ขึ้นไป NDB ทำงานย่าน LF/MF จึงเกิด night effect คือกลางคืน sky wave รบกวน ground wave ทำให้เข็มแกว่งและคลาดเคลื่อน นอกจากนี้ยังมี coastal refraction (shoreline effect) ที่คลื่นหักเหเมื่อข้ามแนวชายฝั่งแบบเฉียง ทำให้ bearing ที่วัดได้ผิดไป
QTE และความสัมพันธ์ QDM/QDR/QTE
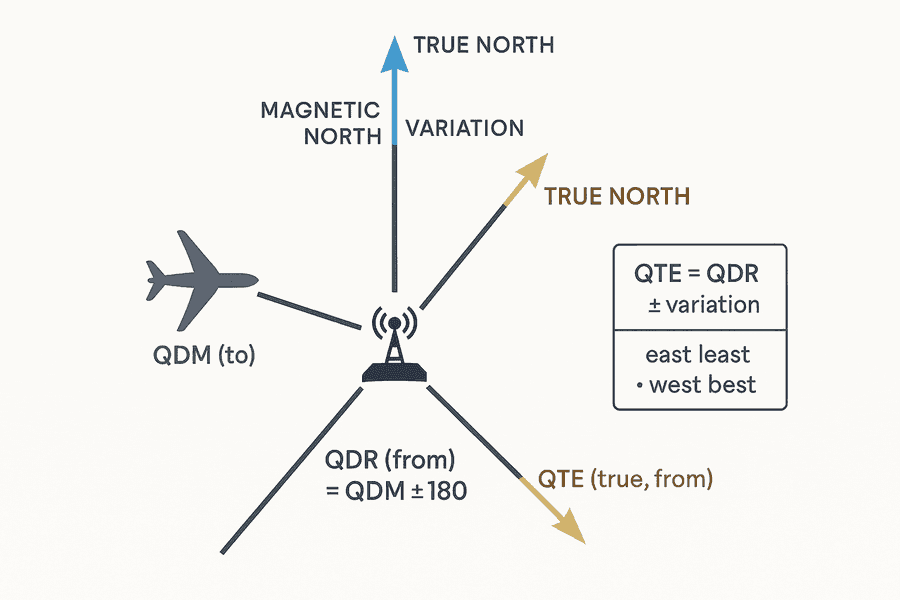
นอกจาก QDM (ทิศแม่เหล็กไปยังสถานี) และ QDR (ทิศแม่เหล็กออกจากสถานี ซึ่งเป็นค่าตรงข้าม QDM 180 องศา) ยังมี QTE คือ true bearing «ออกจาก» สถานี วัดเทียบกับเหนือจริง (true north) แทนเหนือแม่เหล็ก จึงต้องนำ QDR มาแก้ค่า variation จึงได้ QTE สรุปคือ QTE = QDR ± variation (บวกถ้า variation ตะวันออก ลบถ้าตะวันตก ตามกฎ «east is least, west is best» ในทางกลับกัน) ค่า QTE มีประโยชน์เมื่อต้องลงแนวเส้นบนแผนที่ที่อ้างอิงเหนือจริง
การทำ Navigation Log และสามเหลี่ยมลม (Wind Triangle)
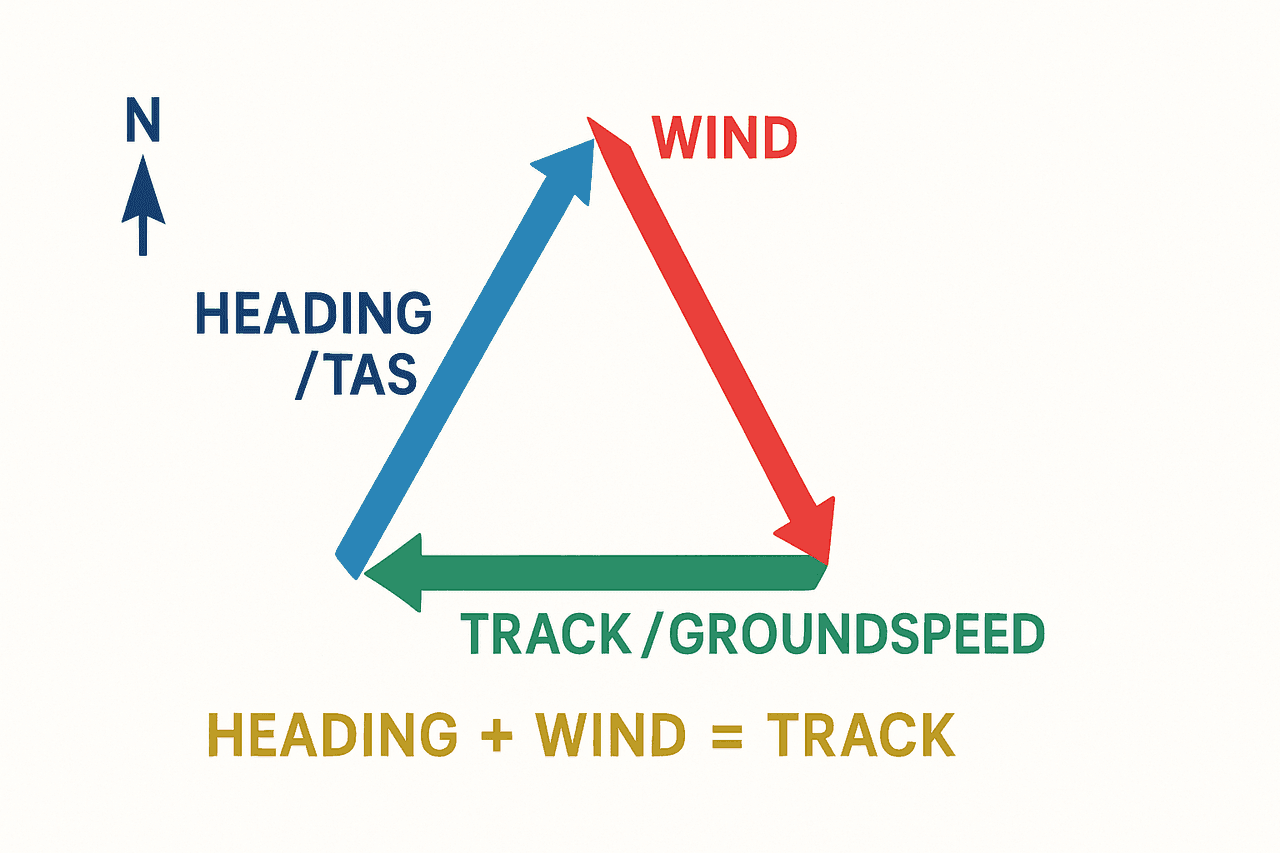
นี่คือทักษะหัวใจของนักบิน PPL ก่อนออกบินทุกครั้ง เราต้องเปลี่ยน เส้นทางที่ขีดบนแผนที่ ให้กลายเป็น ทิศหัวเครื่องที่ต้องบินจริง และ เวลาที่ต้องใช้ เครื่องมือคือ สามเหลี่ยมลม (wind triangle) ซึ่งเป็นการบวกเวกเตอร์สามตัวเข้าด้วยกัน
สามเหลี่ยมลมประกอบด้วยเวกเตอร์สามด้าน:
- เวกเตอร์ลม (Wind Velocity, W/V) — ลมพัด จาก ทิศใดด้วยความเร็วเท่าใด เช่น 270/20 คือลมจากทิศ 270° แรง 20 kt
- เวกเตอร์อากาศ (Air Vector) — ทิศหัวเครื่อง (Heading, HDG) บวกความเร็วผ่านอากาศ (True Air Speed, TAS) คือสิ่งที่เครื่องบิน "อยากไป"
- เวกเตอร์พื้น (Ground Vector) — เส้นทางจริง (Track, TK) บวกความเร็วเหนือพื้น (Ground Speed, GS) คือสิ่งที่เกิดขึ้น "จริง" หลังลมพัด
ความสัมพันธ์คือ: Air Vector + Wind Vector = Ground Vector เราขีดเส้นทาง (Track) ก่อน แล้วใช้ลมหามุมแก้ลม (WCA) เพื่อหาหัวเครื่อง (Heading) และความเร็วเหนือพื้น (GS)
การอ่านแผนที่ 1:500,000 (Aeronautical Chart)
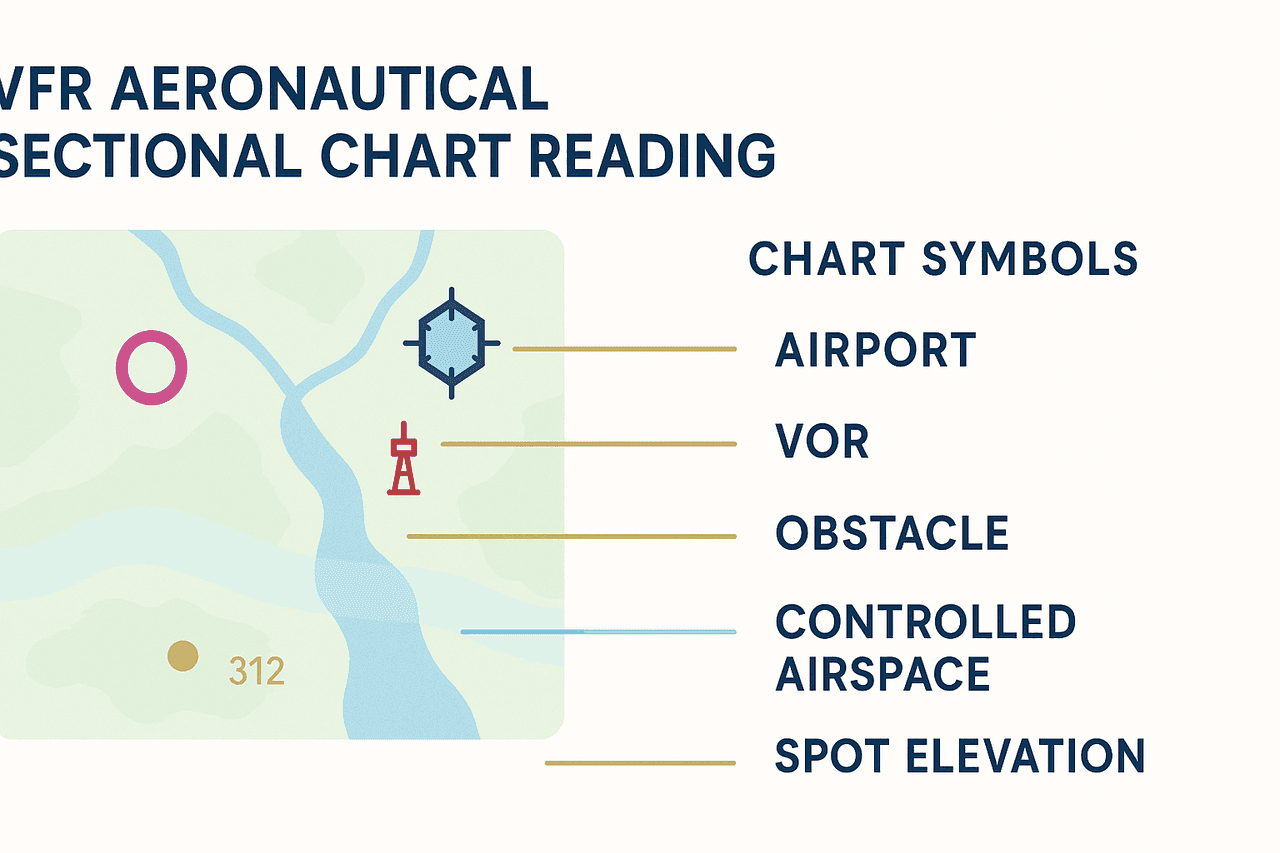
แผนที่บินมาตรฐานที่ PPL ใช้คือ ICAO 1:500,000 การอ่านแผนที่ได้คล่องคือทักษะภาคปฏิบัติที่สำคัญที่สุดอย่างหนึ่ง
วัดเส้นทาง (Track): วางไม้โปรแทรกเตอร์ที่จุดตัด meridian ใกล้กึ่งกลาง leg แล้ววัดมุมของเส้นทางเทียบกับ เหนือจริง (true north) ได้เป็น TK(T)
วัดระยะทาง — ใช้สเกลละติจูด: จุดสำคัญที่ออกสอบคือ 1 ลิปดา (1') ของละติจูด = 1 ไมล์ทะเล (NM) เสมอ ดังนั้นใช้ขอบซ้าย/ขวาของแผนที่ (เส้นละติจูด) เป็นไม้บรรทัดวัดระยะได้เลย ห้ามใช้สเกลลองจิจูด (ขอบบน/ล่าง) เพราะระยะ 1' ของลองจิจูดหดสั้นลงเมื่อเข้าใกล้ขั้วโลก
สัญลักษณ์ภูมิประเทศ (topographical symbols): แผนที่บินใช้สัญลักษณ์มาตรฐานสำหรับเมือง ถนน ทางรถไฟ แม่น้ำ เสาส่งไฟฟ้า และเสาอากาศ สิ่งเหล่านี้คือ จุดสังเกตภาคพื้น (landmarks) ที่ใช้ยืนยันตำแหน่ง
ความสูงและภูมิประเทศ (relief & spot heights): ระดับความสูงแสดงด้วยเฉดสี (สีเข้ม = สูง), เส้นชั้นความสูง (contour lines) และจุดบอกความสูง (spot height ตัวเลขจุดยอดสูงสุด) รวมถึง Maximum Elevation Figure (MEF) ในแต่ละช่องตาราง — สำคัญมากต่อการเลือกความสูงบินให้พ้นสิ่งกีดขวาง
การแสดงห้วงอากาศ (airspace): เส้นขอบ Class ต่าง ๆ, เขตหวงห้าม/อันตราย (Prohibited/Restricted/Danger areas), ATZ, ความสูงของแต่ละ class แสดงด้วยตัวเลขเศษส่วน (เพดานบน/พื้นล่าง)
การหาตำแหน่งด้วยสองเส้นเบริง (fixing position): เมื่อไม่แน่ใจตำแหน่ง ให้รับ bearing จาก จุดสังเกตหรือสถานีวิทยุสองแห่ง แล้วลากเส้นบนแผนที่ จุดที่เส้นสองเส้นตัดกันคือตำแหน่งของเรา (เรียก cross-fix) ถ้าใช้สามเส้นจะได้ "cocked hat" สามเหลี่ยมเล็ก ๆ ที่ตำแหน่งจริงอยู่ภายใน
ความเร็วสามแบบ: IAS / TAS / GS
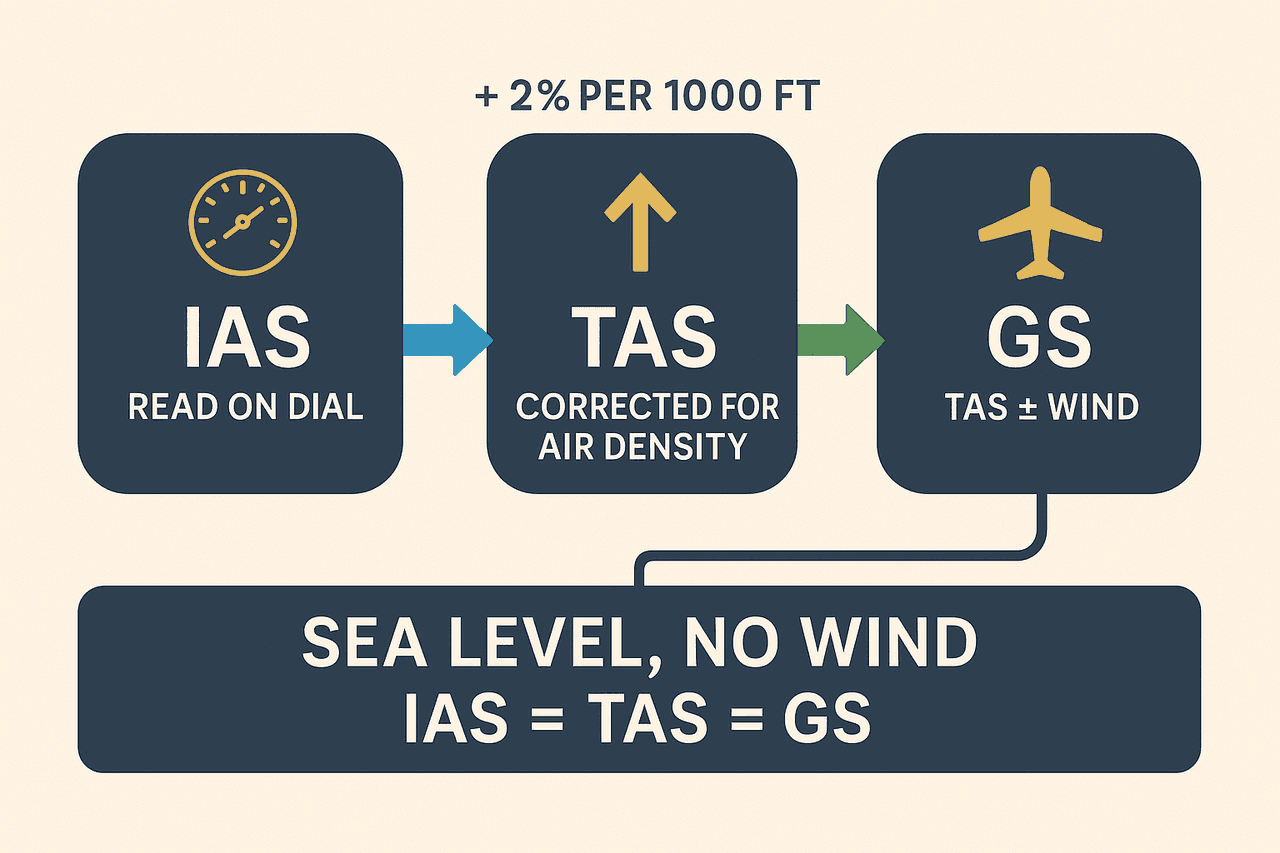
นักบินต้องแยกความเร็วสามค่าให้ชัด เพราะใช้คนละงาน:
- IAS (Indicated Air Speed) — ความเร็วที่ "อ่านได้บนหน้าปัด" ใช้บินจริง (คุม stall, flap, V-speeds) เพราะสะท้อนแรงดันอากาศที่ปีกรู้สึกจริง
- TAS (True Air Speed) — ความเร็วจริงของเครื่องเทียบกับ มวลอากาศ ที่ระดับสูงขึ้น อากาศบางลง IAS ค่าเดิมจะเท่ากับ TAS ที่สูงขึ้น (คร่าว ๆ TAS เพิ่ม ~2% ต่อ 1,000 ฟุต) ใช้ TAS ในการคำนวณ navigation
- GS (Ground Speed) — ความเร็วจริงเทียบกับ พื้นดิน = TAS ± ลม ใช้คำนวณเวลาและ ETA
ขั้นตอนเมื่อหลงทาง (Lost Procedure)
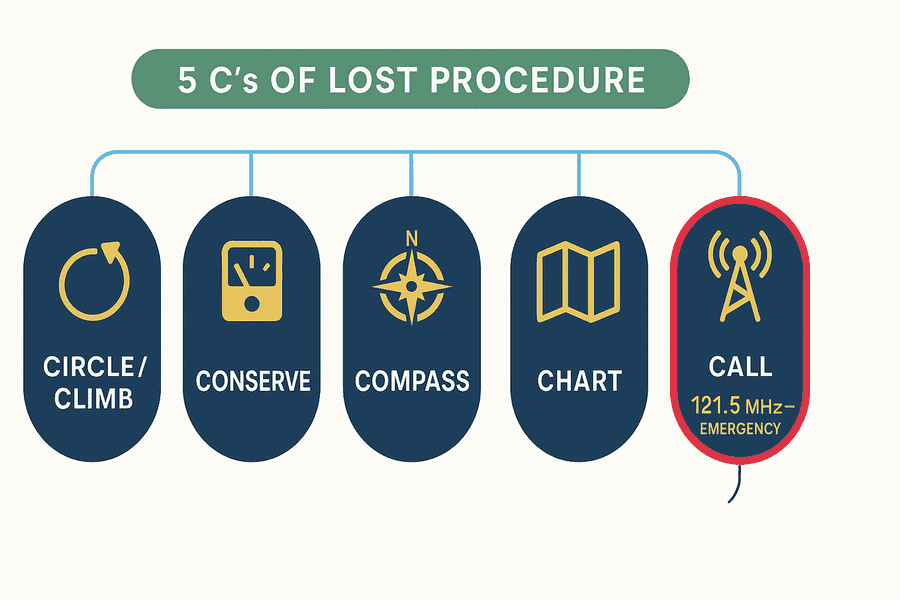
ถ้าไม่แน่ใจตำแหน่ง อย่าตื่นตระหนกและอย่าบินมั่ว จำลำดับ 5 C's:
- Circle / Climb — บินวนรักษาระดับ หรือไต่ขึ้นเพื่อเห็นภูมิประเทศกว้างขึ้นและรับสัญญาณวิทยุ/เรดาร์ดีขึ้น
- Conserve — ลดกำลังเครื่องประหยัดน้ำมัน คำนวณน้ำมันที่เหลือ
- Compass — ยึดทิศหัวเครื่องที่ทราบล่าสุด อย่าหลงทิศ
- Chart — เทียบภูมิประเทศที่เห็นจริงกับแผนที่ ใช้ landmark เด่น ๆ (แม่น้ำ ชายฝั่ง ถนนใหญ่) หาตำแหน่ง
- Call — ขอความช่วยเหลือทางวิทยุ ใช้บริการ D/F หรือ radar ขอ position fix หรือ vector กลับ ความถี่ฉุกเฉิน 121.5 MHz
สรุปท้ายบท
เนื้อหาหลักคือพิกัดบนโลก การเอียงของแกนโลก การแปลงทิศจาก True ไป Compass การแก้มุมปัดลม การสร้างสามเหลี่ยมลมและ Navigation Log การอ่านแผนที่ 1:500,000 และโจทย์คำนวณกฎ 1 in 60 กับการหา QDM
คำศัพท์สำคัญ
พิกัดบอกตำแหน่งบนโลก
ทิศที่จมูกชี้ / ที่เคลื่อนจริงเหนือพื้น
มุมระหว่างเหนือจริงกับเหนือแม่เหล็ก (East least, West best)
ทิศแม่เหล็กที่มุ่งไปยังสถานี NDB = HDG(M)+RB
เบน 1° ≈ ออกนอกทาง 1 nm ต่อ 60 nm
เวกเตอร์อากาศ + เวกเตอร์ลม = เวกเตอร์พื้น
จุดที่มักออกสอบ
- แปลงทิศ: True → Variation → Magnetic → Deviation → Compass
- drift = ส่วนต่างระหว่าง heading กับ track (เกิดจากลม)
แบบทดสอบท้ายบท
117 ข้อ